旋翼无人机的飞行原理是什么?
时间: 2021-04-12 12:53:34 | 作者:田家大院院士 | 来源: 喜蛋文章网 | 编辑: admin | 阅读: 106次
- 2023-03-13 09:04:56物理科普的渠道有哪些
- 2023-01-02 12:04:32理论物理科普有什么意义
- 2022-10-26 21:00:18高二 有哪些关于物理科普类的书啊
- 2022-01-02 03:00:56有哪些好的适合高中和大学的物理科普书籍

以旋翼为主要特征的无人机主要通过控制旋翼的转速来改变空间姿态和位置。
以四旋翼电动无人机为例,4个旋翼布局方式为“X”型,相邻两旋翼转向相反,当两对转向相反的旋翼产生的升力相等时,反转扭矩的作用刚好抵消,从而防止无人机自旋。通过控制两对旋翼的转速即可实现对无人机各种运动姿态的控制。
无人机拥有6个自由度,分别为前后、上下、左右移动,横滚、俯仰、偏航旋转,而控制通道只有升降通道(Thrust),横滚角(Roll)控制通道,俯仰角控制通道(Pitch)和偏航角控制通道(Yaw)4个,因此无人机是一种欠驱动耦合性强的非线性系统。以无人机质心为原O,正前方为X轴正方向,右侧方为Y轴正方向,竖直向上为Z轴正方向建立机体坐标系,分析各种运动姿态原理,如图所示。
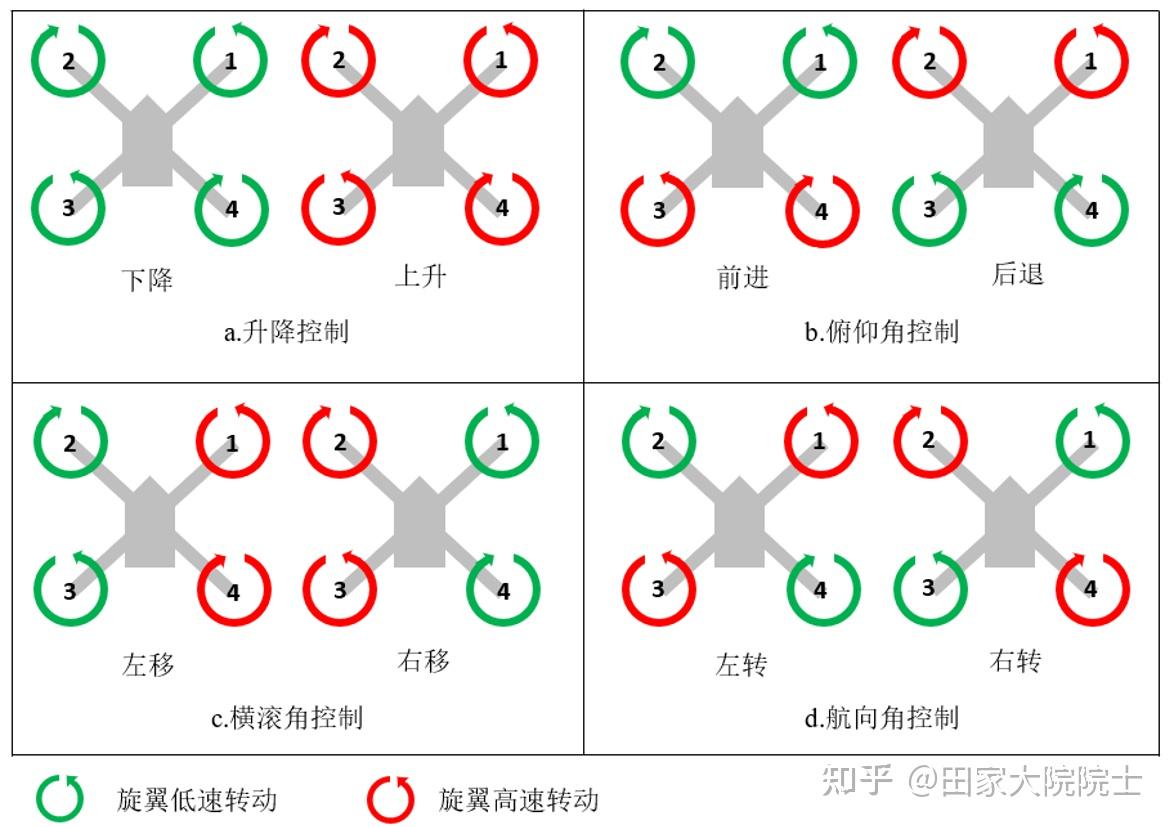
升降运动:在图a中,同时增大无人机四个旋翼转速,使得总升力大于无人机整体重量后无人机将沿着Z轴垂直上升,反之,减小四个旋翼转速使总升力小于无人机自身重量后,无人机将垂直降落。在无外界干扰的情况下当总升力等于机体重量时无人机将保持悬停。
前后运动:如图b所示,3、4号旋翼转速增大,1、2号旋翼转速保持,前后升力差会导致无人机出现“前低后高”的姿态,旋翼推力在X轴正方向的分力将驱动无人机前进;同理当1、2号旋翼转速增大,3、4号旋翼转速不变时无人机将会后退。
左右移动:与前后移动原理相同,在图c中,1、4号旋翼转速增大时无人机向左移动,2、3号旋翼转速增大时无人机向右移动。
偏航运动:如图d所示,当一对正转旋翼与一对反转旋翼转速相同时,产生的扭矩则相互抵消,无人机不旋转。和当1、3号旋翼转速增大而2、4号旋翼转速不变时,1、3号旋翼对机体产生的扭矩大于2、4号旋翼的反扭矩,因此无人机将绕Z轴进行逆时针旋转;反之,当2、4号旋翼转速大于1、3号旋翼转速时,无人机将绕Z轴顺时针旋转。
其他6旋翼、8旋翼无人机的飞行原理也与此一致。
[旋翼无人机的飞行原理是什么?] 相关文章推荐:
- 最新经典文章
- 热门经典文章
- 热门文章标签
全站搜索